
Système d’alimentation sans fil pour robots mobiles autonomes
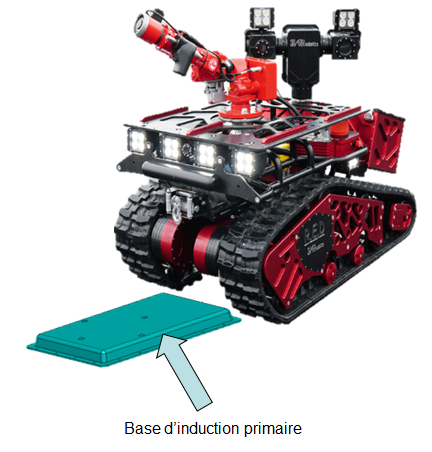
Pour qu’un robot mobile soit complètement autonome, il faut qu’il puisse s’alimenter par lui-même à une source d’énergie. Nous proposons des bases d’induction pour la recharge des robots qui accomplissent des missions automatiques 24h/24.
La surveillance des installations à l’intérieur ou à l’extérieur des bâtiments est un secteur où le robot autonome de surveillance est sur le point de révolutionner l’industrie de la sécurité.
Après avoir fait ses preuves aux États-Unis, la robotisation de certaines activités de sécurité arrive en Europe à grande vitesse. Les bénéfices sont évidents : augmentation du niveau de sécurité à un coût très compétitif.
Des robots permettent le transport autonome des outils ou de toute sortes d’objets.
 Nous proposons une solution de réapprovisionnement en énergie permettant la conception de robots mobiles autonomes sans connexion physique à la source d’approvisionnement.
Nous proposons une solution de réapprovisionnement en énergie permettant la conception de robots mobiles autonomes sans connexion physique à la source d’approvisionnement.
Le système d’alimentation par induction comprend une station fixe connectée au réseau ou à une source photovoltaïque elle-même connectée à une batterie de stockage. Le robot est par ailleurs équipé d’un module récepteur d’induction placé dessous et connecté à la batterie.
Lorsque la recharge de la batterie du robot est terminée, le robot peut reprendre sa mission et s’éloigner de sa base de chargement par induction ou rester en attente sur sa base pour une prochaine mission.
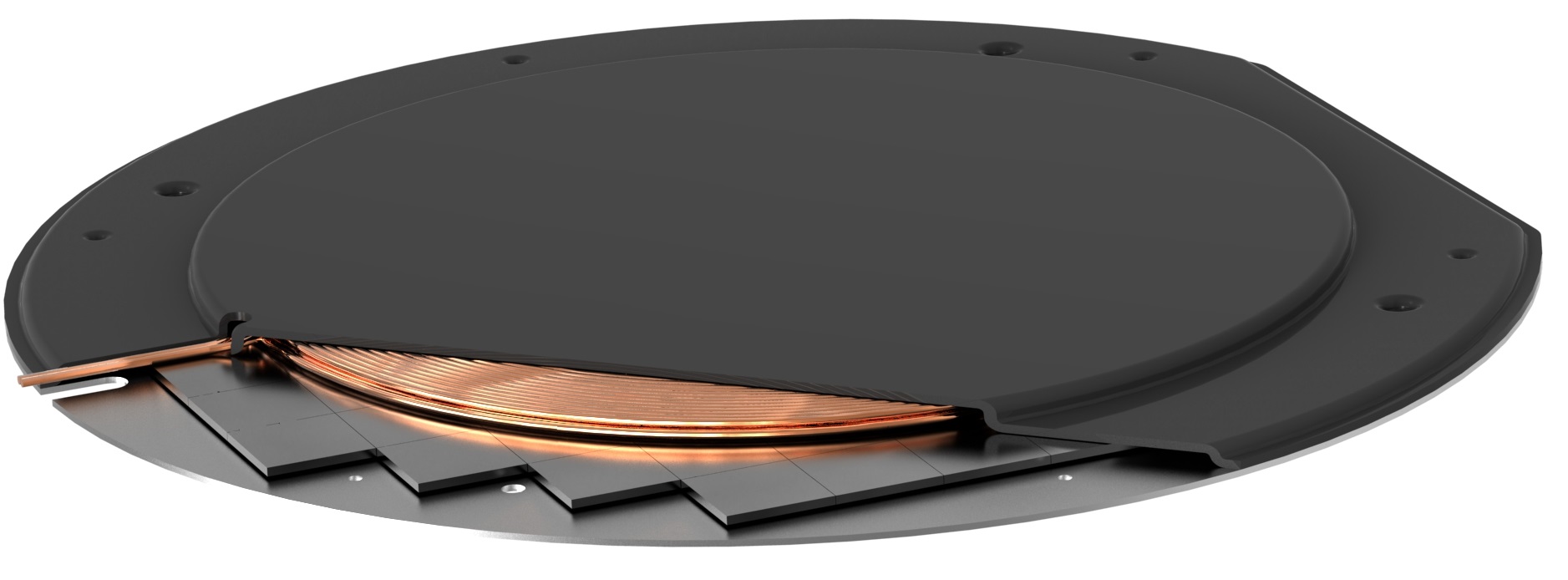
Inducteur secondaire disposé sous le robot
Chargeur par induction sous-marin
